A Ball on Plate system is
the two dimension extension
to the Ball on Beam system.
The problem of the Ball on
Beam becomes interesting
because when the ball begins
moving it will roll off the
end of the beam if no
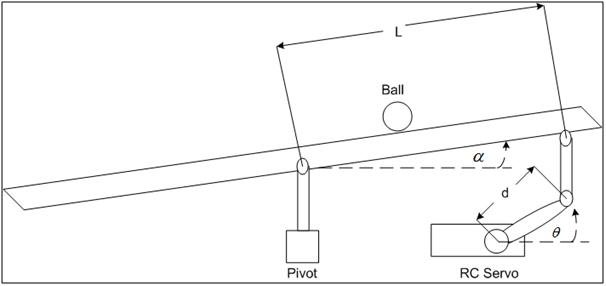
control action is taken. The
construction of the Ball on
Beam involves a beam that
can be tilted either from
the centre of the axis or
from the edge axis by an
actuator. The ball is
restricted to one
dimensional movement, which
is along the beam only. The
sensor used in this system
measures the ball position
and is usually a resistance
wire running along the beam.
The ball is made of
conductive material, for
instance a steel ball
bearing. As the ball rolls
sideways, this will vary the
total resistance of the
system, so the overall
resistance will give the
precise indication where the
ball is. The Ball on Plate
system is figured out as the
2-D evolution of the Ball on
Beam system. It has an x and
y-dimension which allows the
ball to roll along different
paths. This type of system
can be controlled for both
position of the ball and
path following, thereby
opening up another field in
robotics, that is trajectory
planning. It will have
several direct applications
too such as robotic
manipulation of round
objects. When it comes to
indirect applications,
undergraduate students will
benefit from this because of
demonstration in control and
image processing and can be
used as lab apparatus.
Various experiments can be
carried out by using this
system. These reference
experiments are:
• Application and
research of image processing
algorithms
• Research of PID controller
and other classical control
methods
• System dynamics modelling
and analysis
• Research of self-defined
control algorithms
Apart from these
experiments, different
control examples can be
carried out, and these are:
• Position the ball to a
specific location on the
plate
• Movement of the ball to a
particular position via a
specific trajectory
• Travelling of the ball to
a certain point under local
limitation of rotation in a
certain direction
Robotics and Control is
an area which interests me a
lot. This was the starting
point for choosing a project
like this. Another reason
for such choice was that it
would be a test bed for
further studies in my
career, and continue to
develop work on robotics and
control systems. The second
target was that the project
can be used as an apparatus
to teach undergraduate
engineering students,
especially in Signals &
Systems, Robotics and
Control.
Robotics and Control is an
area which interests me a
lot. This was the starting
point for choosing a project
like this. Another reason
for such choice was that it
would be a test bed for
further studies in my
career, and continue to
develop work on robotics and
control systems. The second
target was that the project
can be used as an apparatus
to teach undergraduate
engineering students,
especially in Signals &
Systems, Robotics and
Control.
Ball on Plate control -
Video
Results and Outcome
In this thesis we presented
a ball on plate control
scheme based on three
controllers with the use of
a vision system. The
presented methods has been
implemented on the hardware
implementation built and
simulated using Simulink.
The final results obtained
by this project were
satisfactory. This is
because when the final
testing on the project was
ready (all the mechanical
and electronics combined
together), the ball on plate
system performed very well.
The reason that the result
was good, was because a good
division of work was done at
the beginning. Good
modelling was done too and
this resulted into realistic
simulations for the
controller design. After
making the hardware of the
system, it was very easy to
implement since the
simulations gave very
realistic results.
The PID controller described
in this thesis worked as
designed. The main factor
that changed a little bit
the controller PID values
was the modelling section.
Since the friction element
was not included in the
model, it affected the
actual system (since the
ball had some friction with
the plate and static energy)
with regards the integrator
PID value.
In a general concern the
objectives for this thesis
were accomplished,
especially for the static
position balancing (with
disturbance). With the help
of the software program with
Matlab™ GUI the ball can be
placed in any static
location on the plate with
corrections for every
disturbance. Regarding the
other two path following
(square path and circular
path) the system performed
well too with slight
oscillations about the
intended path.
Note: To report broken links or to submit your projects,
tutorials please email to Webmaster